Universal Ink Data Format
The Universal Ink Model is serialized as Protocol Buffers v3 message and wrapped within a RIFF container. The sections below describe the container and the protobuf serialization scheme.
RIFF Container
The Universal Ink Model (UIM) is serialized into a RIFF container, within the RIFF chunk UIM3. This chunk contains two sub-chunks, namely HEAD and DATA. The HEAD chunk contains the current version of the specification. The version is encoded using 3 bytes and is defined as follows: [major-version]-[minor-version]-[patch-version].
The ink model is serialized as Protocol Buffers message as described in section 8.2 Protocol Buffers Serialization Scheme and stored in the DATA chunk.
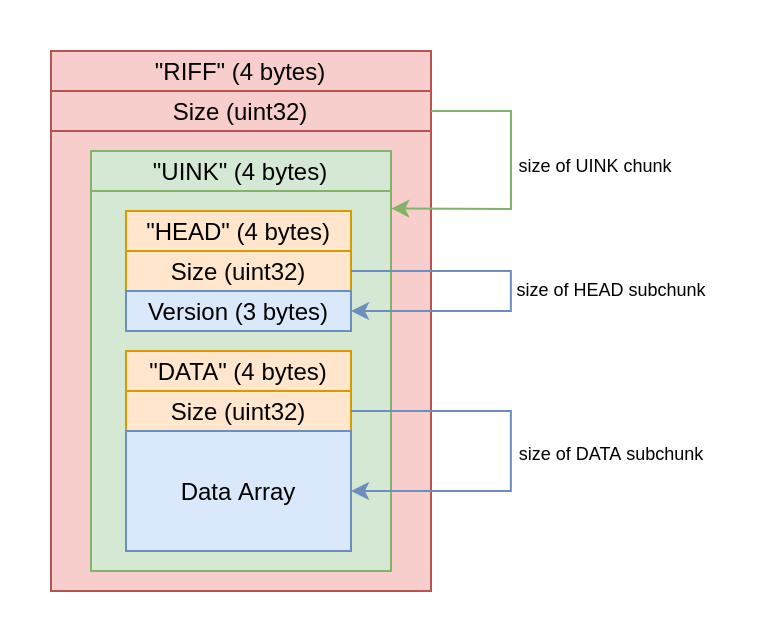
Figure 1: RIFF diagram
Ink Tree
The ink tree is built with a generic node structure.
For building the tree the depth attribute reflects the depth within the tree.
For serialization of the tree structure, the depth first pre-order tree serialization is applied, as illustrated in Figure 3.
Each node has an unique identifier id which is relevant for the semantic statements as an identifier for the subject.
The index attribute links to the path or sensor data index.
The groupBoundingBox is optional and assists with easier visual debugging or to highlight the relevant area for clickable options.
Only when the type of the node is CHUNK the attributes chunkFromIndex and chunkToIndex are relevant for sub-indexing.
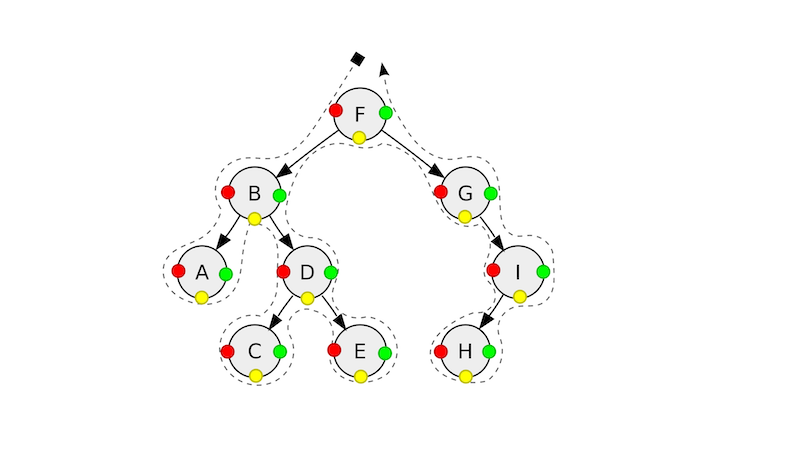
Figure 2: Depth-First tree order in red: F, B, A, D, C, E, G, I, H.
Data compression
Encoding
The encoding process works as follows:
Step 1. (optional) Convert floating-point values to integer values using externally-specified decimal precision:
integerValue = floatValue * (10 ^ decimalPrecision);
Note: Step 1 is only applied if there the datatype is not an integer datatype (e.g., UINT32, UINT64, INT32, or INT64).
Step 2. Perform delta encoding on the converted values:
encodedValues[0] = integerValues[0];
for(i = 1; i < n; i++)
{
encodedValues[i] = integerValues[i] - integerValues[i - 1];
}
Note: In converting between floating-point values and fixed-point (integer) values, some precision can be lost.
If precision is critical to application functionality, you must take this into consideration.
A possible solution is to rely on IEEE 754: in this case, for every value to be converted, you should use the appropriate decimalPrecision and an approximation that remains unchanged during this conversion.
Decoding
To restore the original values, the encoding process is reversed, as follows:
Step 1. Perform delta decoding to restore the integer values:
integerValues[0] = encodedValues[0];
for(i = 1; i < n; i++)
{
integerValues[i] = integerValues[i - 1] + encodedValues[i];
}
Step 2. (optional) Convert integer values to floating-point values using externally-specified decimal precision:
floatValue = integerValue / (10 ^ decimalPrecision)
Note: Step 2 is only applied if the datatype is not an integer datatype.
Protobuf Serialization Scheme
BrushPrototype
Definition of polygon prototype for brush.
| Field | Type | Label | Description |
|---|---|---|---|
| coordX | float | repeated | List of x coordinates of brush prototype. |
| coordY | float | repeated | List of y coordinates of brush prototype. |
| coordZ | float | repeated | List of z coordinates of brush prototype [for 3D rendering]. |
| indices | uint32 | repeated | List of indices of brush prototype [for 3D rendering]. |
| shapeURI | string | optional | URI uniquely identifying shape's polygon. |
| size | float | optional | Defines prototype per path point size. |
Brushes
Brush descriptions, needed for ink rasterization.
| Field | Type | Label | Description |
|---|---|---|---|
| vectorBrushes | VectorBrush | repeated | List of defined vector brushes. |
| rasterBrushes | RasterBrush | repeated | List of defined raster brushes. |
ChannelData
List of data items.
| Field | Type | Label | Description |
|---|---|---|---|
| sensorChannelID | string | optional | Referencing InkSensorChannel via id. |
| values | sint32 | repeated | Sample values delta encoded with provided precision. |
Environment
Environment defines the all details regarding the input environment:
- Operating System: name, version, etc.
- Application: name, version, etc.
- Geographic information: GPS coordinates.
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | MD5 hash according to the MD5 hash-based Unique Identifier Generation Scheme. |
| properties | Property | repeated | Environment properties, such as OS name, OS, version, etc. |
Float32
Float value wrapper to avoid cross-platform zero value issues.
| Field | Type | Label | Description |
|---|---|---|---|
| value | float | optional | Float value wrapped within the message. |
InkData
Contains all ink data.
| Field | Type | Label | Description |
|---|---|---|---|
| strokes | Stroke | repeated | Data holder for strokes. |
InkInputProvider
Definition of input provider types.
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | MD5 hash according to the MD5 hash-based Unique Identifier Generation Scheme. |
| type | InkInputProviderType | optional | Type of used hardware - PEN, TOUCH, MOUSE, or controller. |
| properties | Property | repeated | InkInputProvider properties, such as PenID. |
InkObject
Ink Object as base structure to capture all relevant data.
- Sensor data recorded from the input sensor
- Brush configurations defining the different brush types used
- Ink data with the visual geometry of the ink strokes
- Ink tree structuring the ink data
- Meta-data describing the author, document, etc.
- Knowledge graph with semantics
| Field | Type | Label | Description |
|---|---|---|---|
| inputData | InputData | optional | Data holder for ink input related data. |
| inkData | InkData | optional | Data holder for ink related ink data. |
| brushes | Brushes | optional | Rasterization tools. |
| inkTree | Node | repeated | The ink-tree: this is the ink-centric data model. |
| views | View | repeated | A list of views of the ink-tree based on the knowledge graph. |
| knowledgeGraph | TripleStore | optional | The Knowledge Graph. |
| transform | Matrix4 | optional | Transform is an affine transformation matrix which is applied to all paths. |
| properties | Property | repeated | Document related properties, such as DOCUMENT, AUTHOR, LAST_MODIFIED, etc. |
InputContext
Capturing context of the ink device with reference to the Environment and the SensorContext.
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | MD5 hash according to the MD5 hash-based Unique Identifier Generation Scheme. |
| environmentID | string | optional | Reference to the Environment. |
| sensorContextID | string | optional | Reference to the SensorContext. |
InputContextData
Container structure for context and input defines.
| Field | Type | Label | Description |
|---|---|---|---|
| inputContexts | InputContext | repeated | List of input contexts. |
| inkInputProviders | InkInputProvider | repeated | List of input providers. |
| inputDevices | InputDevice | repeated | List of input devices. |
| environments | Environment | repeated | List of environment setups. |
| sensorContexts | SensorContext | repeated | List of sensor contexts. |
InputData
Input Data bundles the input.
| Field | Type | Label | Description |
|---|---|---|---|
| inputContextData | InputContextData | optional | Input context data. |
| sensorData | SensorData | repeated | Data holder for sensor data. |
InputDevice
InputDevice with its properties.
The properties can contain:
- Communication Protocol: USB, BTC, BLE, SPP, WIFI
- Communication id: version-WILL3-VID, PID; MAC; UID; COM_PORT
- Device Name: Wacom Intuos Pro M, Apple iPad 8, Samsung GalaxyTab 10
- Serial number
- Firmware Version (MCU)
- Secondary Firmware Version (BT, WIFI) - different modules provides version for itself
- Orientation: PORTRAIT, LANDSCAPE, PORTRAIT_REVERSE, LANDSCAPE_REVERSE or 0, 90, 180, 270
- Sensor size
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | MD5 hash according to the MD5 hash-based Unique Identifier Generation Scheme. |
| properties | Property | repeated | InputDevice properties. |
Matrix4
Representation of a 4x4 affine matrix
| m00 m01 m02 m03 | | m10 m11 m12 m13 | | m20 m21 m22 m23 | | m30 m31 m32 m33 |
| Field | Type | Label | Description |
|---|---|---|---|
| m00 | float | optional | |
| m01 | float | optional | |
| m02 | float | optional | |
| m03 | float | optional | |
| m10 | float | optional | |
| m11 | float | optional | |
| m12 | float | optional | |
| m13 | float | optional | |
| m20 | float | optional | |
| m21 | float | optional | |
| m22 | float | optional | |
| m23 | float | optional | |
| m30 | float | optional | |
| m31 | float | optional | |
| m32 | float | optional | |
| m33 | float | optional |
Node
The node message used for the definition of tree-structures.
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | Node unique identifier |
| depth | uint32 | optional | Depth in hierarchy structure |
| index | uint32 | optional | Index in InkData.paths or in InkData.sensorData data holder |
| type | NodeType | optional | (PATH & SENSOR_DATA nodes only)Node type |
| groupBoundingBox | Rectangle | optional | Bounding box (Group nodes only) |
| chunkFromIndex | uint32 | optional | Chunk beginning (CHUNK node only) |
| chunkToIndex | uint32 | optional | Chunk ending (CHUNK node only) |
PathPointProperties
Pipeline properties which not varies. Variable ones are serialized via Stroke message.
| Field | Type | Label | Description |
|---|---|---|---|
| size | Float32 | optional | Brush size. |
| red | Float32 | optional | Color value [0, 1] for red channel. |
| green | Float32 | optional | Color value [0, 1] for green channel. |
| blue | Float32 | optional | Color value [0, 1] for blue channel. |
| alpha | Float32 | optional | Color value [0, 1] for alpha channel. |
| rotation | Float32 | optional | Brush rotation z. |
| scaleX | Float32 | optional | Brush scale x. |
| scaleY | Float32 | optional | Brush scale y. |
| scaleZ | Float32 | optional | Brush scale z [for 3D rendering]. |
| offsetX | Float32 | optional | Brush offset x. |
| offsetY | Float32 | optional | Brush offset y. |
| offsetZ | Float32 | optional | Brush offset z [for 3D rendering]. |
Property
Encodes a single property
| Field | Type | Label | Description |
|---|---|---|---|
| name | string | optional | Name of the property. |
| value | string | optional | Value of property. |
RasterBrush
A brush defined with raster images
| Field | Type | Label | Description |
|---|---|---|---|
| name | string | optional | the brush descriptor. |
| spacing | float | optional | Distance between neighbour particles. |
| scattering | float | optional | The scattering along the curve normal. |
| rotationMode | RotationMode | optional | The particle rotation mode of the brush. |
| shapeTexture | bytes | repeated | List of png images that contains the shape texture. |
| shapeTextureURI | string | repeated | List of URIs associated to the shape texture. |
| fillTexture | bytes | optional | List of png image that contains the fill texture. |
| fillTextureURI | string | optional | URI identifying the fillTexture. |
| fillWidth | float | optional | Width of the fill tile. |
| fillHeight | float | optional | Height of the fill tile. |
| randomizeFill | bool | optional | Specifies whether the fill texture is randomly displaced. |
| blendMode | BlendMode | optional | The applied blend mode. |
Rectangle
Representation of rectangle
| Field | Type | Label | Description |
|---|---|---|---|
| x | float | optional | Lower-left x-coordinate point of rectangle. |
| y | float | optional | Lower-left y-coordinate point of rectangle. |
| width | float | optional | Width of rectangle. |
| height | float | optional | Height of rectangle. |
SemanticTriple
A semantic triple, or simply triple, is the atomic data entity data model. As its name indicates, a triple is a set of three entities that codifies a statement about semantic data in the form of subject predicate object expressions.
| Field | Type | Label | Description |
|---|---|---|---|
| subject | string | optional | |
| predicate | string | optional | |
| object | string | optional |
SensorChannel
Information about the sensor channel.
Supported channel types:
- will:///input/3.0/channel/X
- will:///input/3.0/channel/Y
- will:///input/3.0/channel/Z
- will:///input/3.0/channel/Timestamp
- will:///input/3.0/channel/Pressure
- will:///input/3.0/channel/RadiusX
- will:///input/3.0/channel/RadiusY
- will:///input/3.0/channel/Altitude
- will:///input/3.0/channel/Azimuth
- will:///input/3.0/channel/Rotation
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | MD5 hash according to the MD5 hash-based Unique Identifier Generation Scheme. |
| type | string | optional | URI which describes uniquely this channel. Supported types are: |
| metric | InkSensorMetricType | optional | User defined channels which introduce custom meaning should be provided from user side.Indicates metric used in calculating the resolution for the data item. |
| resolution | double | optional | Is a decimal number giving the number of data item increments. |
| min | float | optional | Per physical unit., e.g. if the physical unit is in m and device units./ Resolution is 100000, then the value 150 would be 0.0015 m.Minimal value of the channel |
| max | float | optional | Maximal value of the channel |
| precision | uint32 | optional | Precision of integer encoding, needed for encoded float values |
SensorChannelsContext
The SensorChannelsContext groups sensor channels that are producing data with the same sampling rate.
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | MD5 hash according to the MD5 hash-based Unique Identifier Generation Scheme. |
| channels | SensorChannel | repeated | Channels in this group provides aligned values in the same time. |
| samplingRateHint | Uint32 | optional | Hint for the intended sampling rate of the channel [Optional]. |
| latency | Uint32 | optional | Latency measure in milliseconds [Optional]. |
| inkInputProviderID | string | optional | Reference to the InkInputProvider. |
| inputDeviceID | string | optional | Reference to the InputDevice. |
SensorContext
Each input device has a SensorContext describing the available sensors of a device. One file can contain Ink data from two device of the same type with a shared context.
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | MD5 hash according to the MD5 hash-based Unique Identifier Generation Scheme. |
| sensorChannelsContext | SensorChannelsContext | repeated | Grouping context for device sensor channels. |
SensorData
SensorData is the central data structure for storing raw data from the ink sensor.
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | |
| inputContextID | string | optional | References the InputContext via id. |
| state | InkState | optional | State of the ink. |
| timestamp | uint64 | optional | Timestamp for first sample of the stroke, measured in milliseconds. |
| dataChannels | ChannelData | repeated | (time when first X & Y are reported). Data channels encoding the data list. |
Stroke
Visual path structure. Stroke in its simplest form contains one or more Segments (Catmull-Rom), which includes a series of positional points, Positions. In addition to those properties, digital ink strokes include start parameter and end parameter as Stroke entity's properties.
| Field | Type | Label | Description |
|---|---|---|---|
| id | string | optional | Internal id. |
| startParameter | float | optional | Spline start parameter [0, 1]. |
| endParameter | float | optional | Spline end parameter [0, 1]. |
| splineX | float | repeated | Spline values for x. |
| splineY | float | repeated | Spline values for y. |
| splineZ | float | repeated | Spline values for z [for 3D rendering]. |
| red | float | repeated | Color values [0, 1] for red channel. |
| green | float | repeated | Color values [0, 1] for green channel. |
| blue | float | repeated | Color values [0, 1] for blue channel. |
| alpha | float | repeated | Color values [0, 1] for alpha channel. |
| size | float | repeated | Brush size. |
| rotation | float | repeated | Brush rotation z. |
| scaleX | float | repeated | Brush scale x. |
| scaleY | float | repeated | Brush scale y. |
| scaleZ | float | repeated | Brush scale z [for 3D rendering]. |
| offsetX | float | repeated | Brush offset x. |
| offsetY | float | repeated | Brush offset y. |
| offsetZ | float | repeated | Brush offset z [for 3D rendering]. |
| sensorDataOffset | uint32 | optional | Index of points mapping between raw and processed paths. |
| sensorDataID | string | optional | Reference sensor data. |
| sensorDataMapping | uint32 | repeated | Explicit mapping between indices of Stroke and SensorData, used when input rate is very high and provides unwanted points. |
| style | Style | optional | Style that is applied to the path. |
Style
A style message, used for Stroke customization.
| Field | Type | Label | Description |
|---|---|---|---|
| properties | PathPointProperties | optional | Static values of properties which do not exist per per path point |
| brushURI | string | optional | Reference to Brush used for stroke rasterization. |
| particlesRandomSeed | uint32 | optional | Particles random seed, required for particle strokes. |
| renderModeURI | string | optional | Defines additional information about stroke visualisation, such as ERASER. |
TripleStore
Encapsulates a list of TripleGroups.
| Field | Type | Label | Description |
|---|---|---|---|
| statements | SemanticTriple | repeated | List of semantic triples. |
Uint32
Unsigned integer value wrapper to avoid cross-platform zero value issues.
| Field | Type | Label | Description |
|---|---|---|---|
| value | uint32 | optional | Unsigned integer value wrapped within the message. |
VectorBrush
A brush defined with a polygon (polyhedron for 3D).
| Field | Type | Label | Description |
|---|---|---|---|
| name | string | optional | Brush descriptor. |
| prototype | BrushPrototype | repeated | Polygon prototype for the brush. |
| spacing | float | optional | Spacing value. |
View
A message representing a view of the ink-tree, which is serialized in form of another tree.
| Field | Type | Label | Description |
|---|---|---|---|
| name | string | optional | View descriptor URI (unique in the model scope). |
| tree | Node | repeated | The tree structure of the current view. |
BlendMode
The blend mode enum lists the different blend modes which can be applied to raster brushes.
| Name | Number | Description |
|---|---|---|
| SOURCE_OVER | 0 | This is the default setting and draws new shapes on top of the existing canvas content. Also known as NORMAL. |
| DESTINATION_OVER | 1 | New shapes are drawn behind the existing canvas content. Also known as NORMAL_REVERSE. |
| DESTINATION_OUT | 2 | The existing content is kept where it doesn't overlap the new shape. Also known as ERASE. |
| LIGHTER | 3 | Where both shapes overlap the color is determined by adding color values. Also known as ADD. |
| COPY | 4 | Only the new shape is shown. Also known as NONE. |
| MIN | 5 | The result is the minimum of both color. The result is a darker color. |
| MAX | 6 | The result is the maximum of both color. The result is a lighter color. |
InkInputProviderType
Defining the different types of input.
| Name | Number | Description |
|---|---|---|
| PEN | 0 | Stylus, smart pens, pen displays, signature capturing device, etc. |
| TOUCH | 1 | Touch controller input: Finger or passive stylus. |
| MOUSE | 2 | Mouse device. |
| CONTROLLER | 3 | 3-DOF or 6-DOF input devices. |
InkSensorMetricType
Supported metric types
| Name | Number | Description |
|---|---|---|
| LENGTH | 0 | Underlying si unit is meter. |
| TIME | 1 | Underlying si unit is second. |
| FORCE | 2 | Underlying si unit is newton. |
| ANGLE | 3 | Underlying si unit is radian. |
| NORMALIZED | 4 | Percentage, expressed as a fraction (1.0 = 100%) relative to max-min. |
| LOGICAL | 5 | Logical value, true / false values. |
| DIMENSIONLESS | 6 | No metric defined for sensor. |
InkState
The ink device state defines the state of the Ink device. WILL 3 supports different modes:
- Writing on a plane
- Hovering above a surface
- Moving in air (VR/AR/MR) interaction
- Only hovering in the air
| Name | Number | Description |
|---|---|---|
| PLANE | 0 | Ink device is writing on a surface. |
| HOVERING | 1 | Hovering over a surface. |
| IN_VOLUME | 2 | Using the ink device in the air, with active inking. |
| VOLUME_HOVERING | 3 | Moving the pen in the air with disabled inking. |
NodeType
Defines the node type.
| Name | Number | Description |
|---|---|---|
| PATH_GROUP | 0 | PATH_GROUP is hierarchically combining stroke nodes. |
| SENSOR_DATA_GROUP | 1 | SENSOR_DATA_GROUP is hierarchically combining sensor data nodes. |
| PATH | 2 | PATH is a node type where nodes directly point to a stroke. |
| SENSOR_DATA | 3 | SENSOR_DATA is a node type where nodes directly point to a sensor data sample sequence. |
RotationMode
The rotation parameter specifies the rotation of the particle.
| Name | Number | Description |
|---|---|---|
| NONE | 0 | Indicates that the shape will not be rotated. |
| RANDOM | 1 | Indicates that the shape will be rotated randomly before it renders. |
| TRAJECTORY | 2 | Indicates that the shape will be rotated to match the path trajectory. |
Scalar Value Types
| .proto Type | Notes | C++ Type | Java Type | Python Type |
|---|---|---|---|---|
| double | double | double | float | |
| float | float | float | float | |
| int32 | Uses variable-length encoding. Inefficient for encoding negative numbers - if your field is likely to have negative values, use sint32 instead. | int32 | int | int |
| int64 | Uses variable-length encoding. Inefficient for encoding negative numbers - if your field is likely to have negative values, use sint64 instead. | int64 | long | int/long |
| uint32 | Uses variable-length encoding. | uint32 | int | int/long |
| uint64 | Uses variable-length encoding. | uint64 | long | int/long |
| sint32 | Uses variable-length encoding. Signed int value. These more efficiently encode negative numbers than regular int32s. | int32 | int | int |
| sint64 | Uses variable-length encoding. Signed int value. These more efficiently encode negative numbers than regular int64s. | int64 | long | int/long |
| fixed32 | Always four bytes. More efficient than uint32 if values are often greater than 2^28. | uint32 | int | int |
| fixed64 | Always eight bytes. More efficient than uint64 if values are often greater than 2^56. | uint64 | long | int/long |
| sfixed32 | Always four bytes. | int32 | int | int |
| sfixed64 | Always eight bytes. | int64 | long | int/long |
| bool | bool | boolean | boolean | |
| string | A string must always contain UTF-8 encoded or 7-bit ASCII text. | string | String | str/unicode |
| bytes | May contain any arbitrary sequence of bytes. | string | ByteString | str |